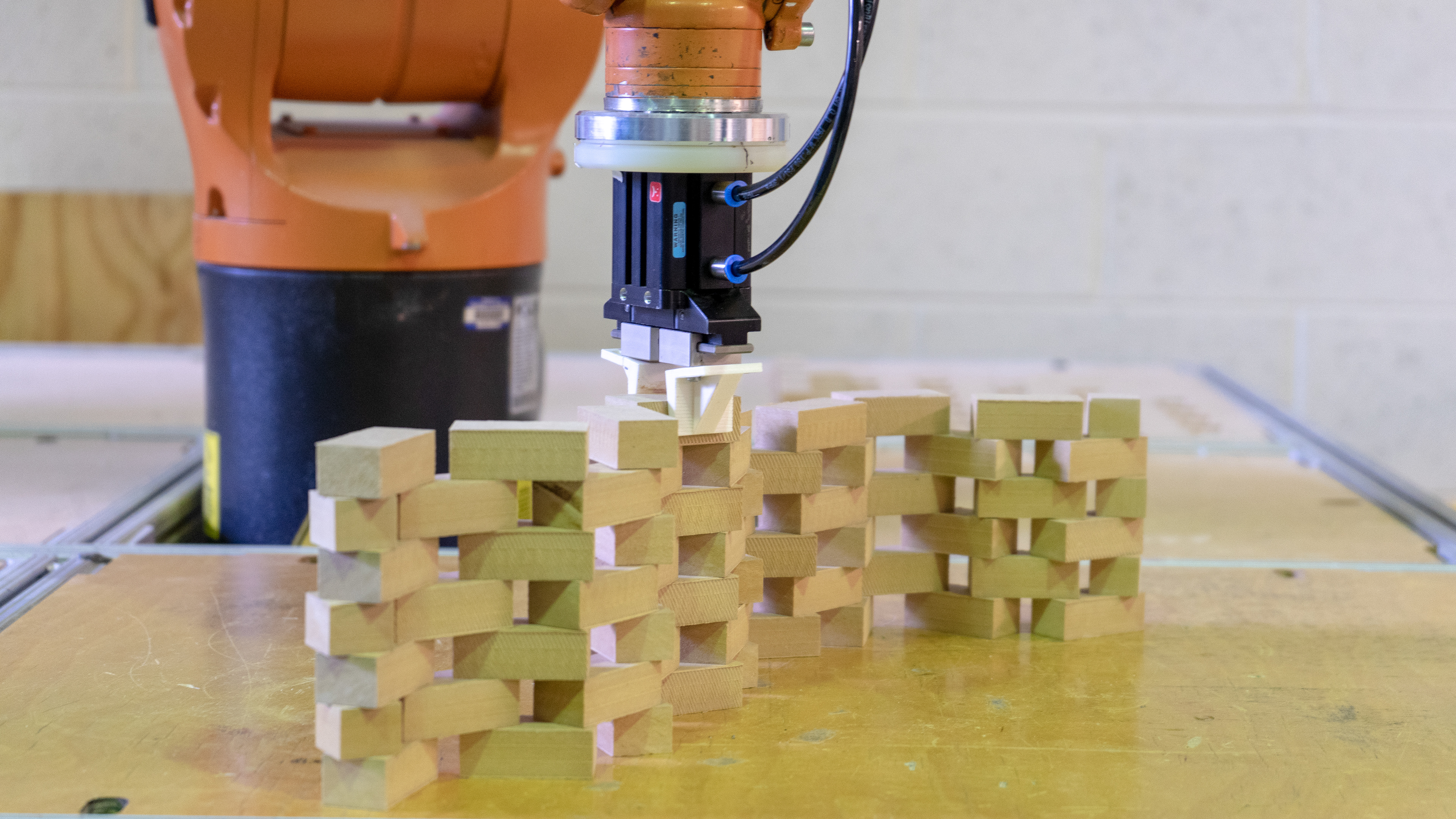
Started with robot-based brick pattern exploration, our team studied the "Weaving" assembly method for bricks. This method is tested to largely increase the whole structural stability with the cantilever. Every brick’s position is scripted in python, which will be translated into Rhino-Grasshopper where being integrated with KUKA PRC for generating the series robotic toolpaths. The final assembly takes 108mins.
Collaborators: Christopher Humphrey, Gabrielle Clune
Instructor: Arash Adel
ARCH 709 Computational Design
Software: Rhino3D + Grasshopper + Python
Machine: KUKA KR6
Material: MDF




